Table of contents
Open Table of contents
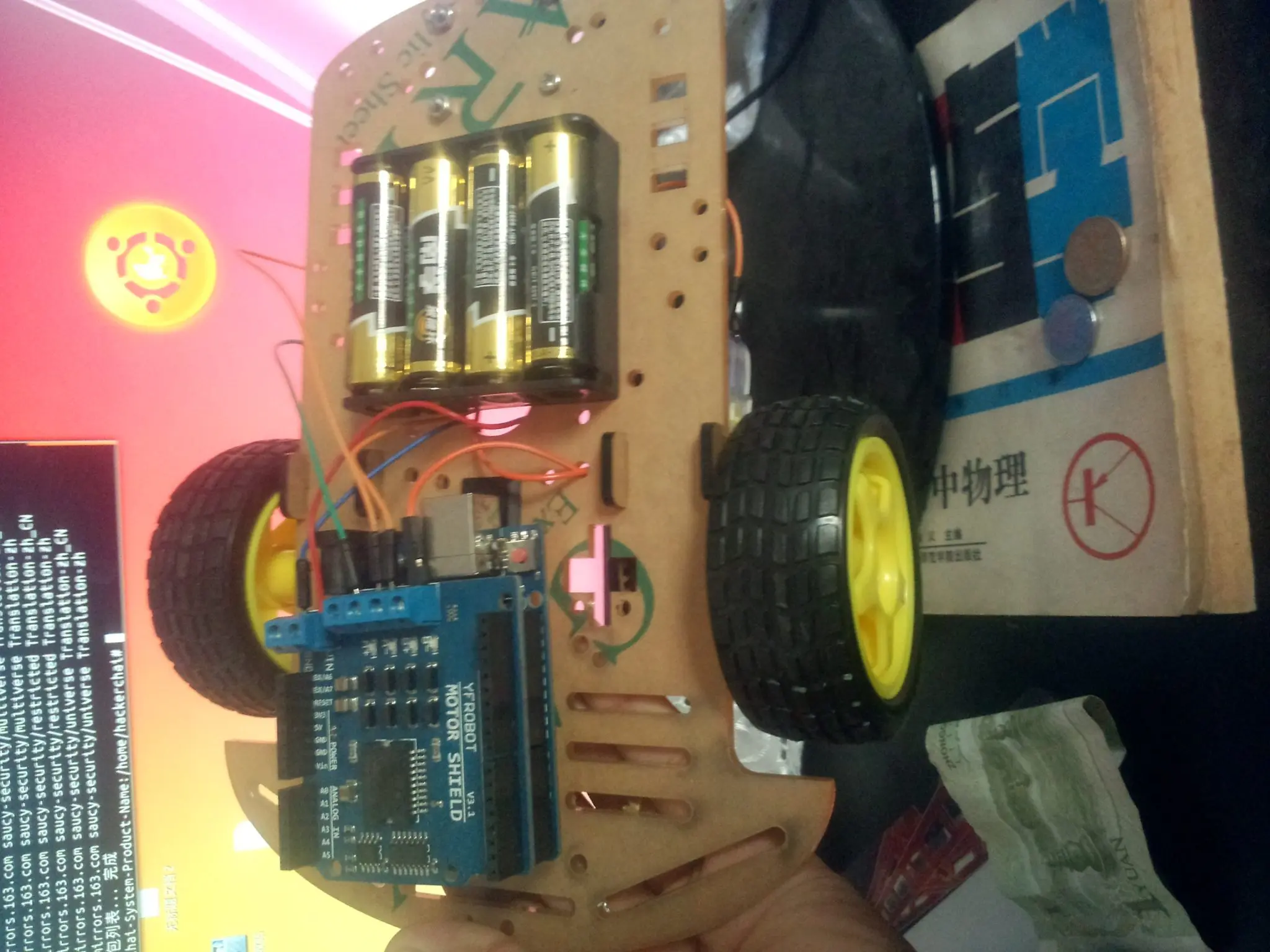
经过三天的努力,终于把Arduino蓝牙小车完工了。整个制作过程挺艰难,又要躲过学校老师的围追堵截,又要高效的完成各个工作。这是我加入东北育才学校机器人实验室之后的第一个作品。在龚鹏老师的帮助下,我完成了整个制作。整个小车的原理很简单,利用Arduino的串口TXD,RXD和蓝牙模块通信,然后通过motor shield来驱动直流减速电机。看起来挺容易,但对于我在这种第一次使用蓝牙模块的人,还是蛮困难的。准备的材料如下: 1.ardino uno 2.L298N 直流电机驱动板 3.直流减速电机 两个 4.智能小车专用底盘(包含轮子)可以自行淘宝搜索下 5.杜邦线若干 6.蓝牙模块(XM-15B)
- Github开源仓库地址 hackerchai/arduino-bluetooth-car
附上代码:
int PWMA=5;
int PWMB=6;
int INA=4;
int INB=7;
void setup()
{
Serial.begin(9600);
pinMode(PWMA,OUTPUT);
pinMode(PWMB,OUTPUT);
pinMode(INA,OUTPUT);
pinMode(INB,OUTPUT);
}
void forward()
{
digitalWrite(INA,HIGH);
digitalWrite(INB,HIGH);
analogWrite(PWMA,500);
analogWrite(PWMB,500);
}
void back()
{
digitalWrite(INA,LOW);
digitalWrite(INB,LOW);
analogWrite(PWMA,500);
analogWrite(PWMB,500);
}
void tleft()
{
digitalWrite(INA,LOW);
digitalWrite(INB,HIGH);
analogWrite(PWMA,200);
analogWrite(PWMB,200);
}
void tright()
{
digitalWrite(INA,HIGH);
digitalWrite(INB,LOW);
analogWrite(PWMA,200);
analogWrite(PWMB,200);
}
void left()
{
digitalWrite(INA,LOW);
digitalWrite(INB,HIGH);
analogWrite(PWMA,200);
analogWrite(PWMB,200);
delay(400);
off();
}
void right()
{
digitalWrite(INA,HIGH);
digitalWrite(INB,LOW);
analogWrite(PWMA,200);
analogWrite(PWMB,200);
delay(400);
off();
}
void off()
{
analogWrite(PWMA,0);
analogWrite(PWMB,0);
}
void loop()
{
while(Serial.available())
{
char c=Serial.read();
switch(c)
{
case 'g':
{
forward();
break;
}
case 'l':
{
tleft();
break;
}
case 'r':
{
tright();
break;
}
case 'b':
{
back();
break;
}
case 't':
{
off();
break;
}
case 'e':
{
left();
break;
}
case 'i':
{
right();
break;
}
}
}
}
后来发现前进不好控制,于是修改下:
int PWMA=5;
int PWMB=6;
int INA=4;
int INB=7;
void setup()
{
Serial.begin(9600);
pinMode(PWMA,OUTPUT);
pinMode(PWMB,OUTPUT);
pinMode(INA,OUTPUT);
pinMode(INB,OUTPUT);
}
void forward()
{
digitalWrite(INA,HIGH);
digitalWrite(INB,HIGH);
analogWrite(PWMA,500);
analogWrite(PWMB,500);
delay(500);
off();
}
void back()
{
digitalWrite(INA,LOW);
digitalWrite(INB,LOW);
analogWrite(PWMA,500);
analogWrite(PWMB,500);
delay(500);
off();
}
void tforward()
{
digitalWrite(INA,HIGH);
digitalWrite(INB,HIGH);
analogWrite(PWMA,500);
analogWrite(PWMB,500);
}
void tback()
{
digitalWrite(INA,LOW);
digitalWrite(INB,LOW);
analogWrite(PWMA,500);
analogWrite(PWMB,500);
}
void tleft()
{
digitalWrite(INA,LOW);
digitalWrite(INB,HIGH);
analogWrite(PWMA,200);
analogWrite(PWMB,200);
}
void tright()
{
digitalWrite(INA,HIGH);
digitalWrite(INB,LOW);
analogWrite(PWMA,200);
analogWrite(PWMB,200);
}
void left()
{
digitalWrite(INA,LOW);
digitalWrite(INB,HIGH);
analogWrite(PWMA,200);
analogWrite(PWMB,200);
delay(400);
off();
}
void right()
{
digitalWrite(INA,HIGH);
digitalWrite(INB,LOW);
analogWrite(PWMA,200);
analogWrite(PWMB,200);
delay(400);
off();
}
void off()
{
analogWrite(PWMA,0);
analogWrite(PWMB,0);
}
void loop()
{
while(Serial.available())
{
char c=Serial.read();
switch(c)
{
case 'g':
{
forward();
break;
}
case 'o':
{
tforward();
break;
}
case 'l':
{
tleft();
break;
}
case 'r':
{
tright();
break;
}
case 'b':
{
tback();
break;
}
case 't':
{
off();
break;
}
case 'e':
{
left();
break;
}
case 'i':
{
right();
break;
}
}
}
}完工照片
附上视频: http://youku.tv/BJQEyU